4.2. Všeobecný elektrický obvod#
Pri riešení tohto príkladu postupujeme rovnako ako v predchádzajúcom príklade.
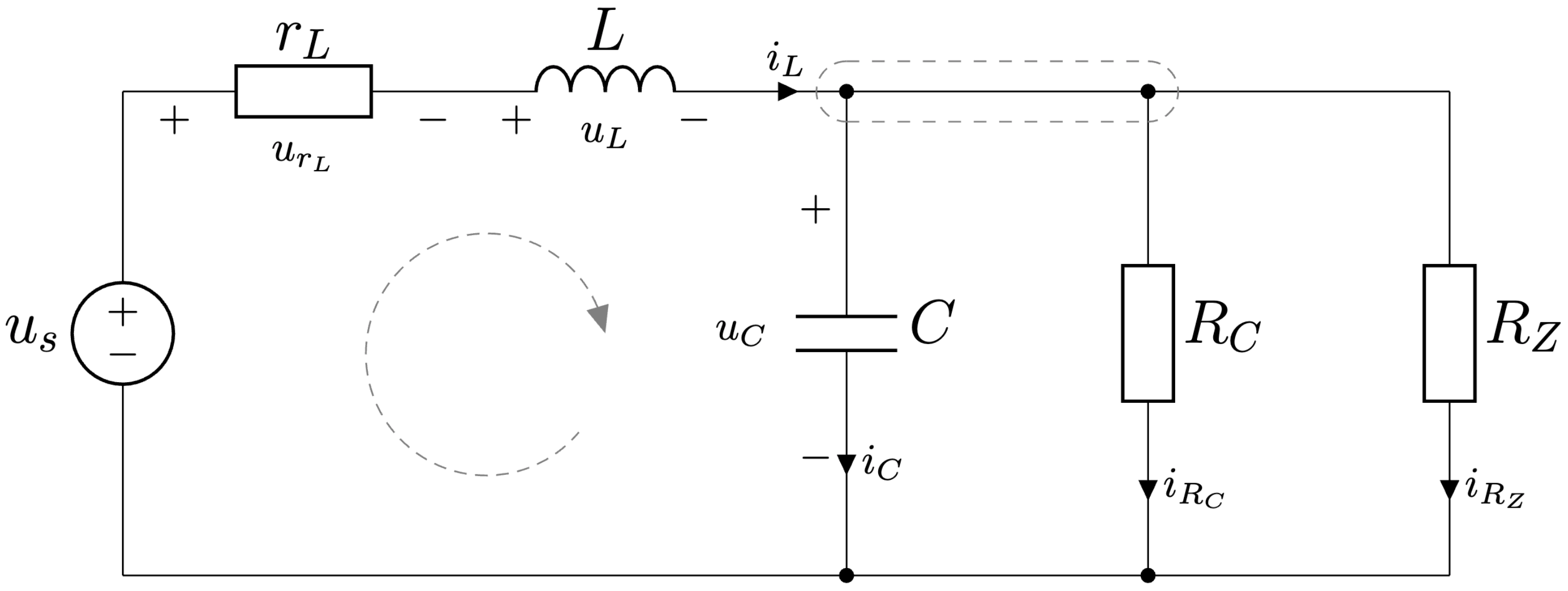
Obr. 4.2 Elektrický obvod.#
Najprv použijeme druhý Kirchhoffov zákon na získanie prvej diferenciálnej rovnice
(4.7)#\[\begin{split}
\begin{align}
\begin{split}
-u_{s} + u_{r_L}+u_L + u_C &= 0, \\
-u_{s} + r_L \, i_L+L \frac{\mathrm{d} i_L}{\mathrm{d} t} + u_C &= 0, \\
L \frac{\mathrm{d} i_L}{\mathrm{d} t} &= -r_L \, i_L-u_C + u_{s}, \\
\frac{\mathrm{d} i_L}{\mathrm{d} t} &= -\frac{r_L}{L}\, i_L-\frac{1}{L} u_C + \frac{1}{L} u_{s}.
\end{split}
\end{align}
\end{split}\]
Ďalej použijeme prvý Kirchhoffov zákon na získanie druhej diferenciálnej rovnice
(4.8)#\[\begin{split}
\begin{align}
\begin{split}
-i_L +i_C +i_{R_C}+i_{R_Z} &= 0, \\
-i_L + C \frac{\mathrm{d} u_C}{\mathrm{d} t} + \frac{1}{R_C} u_C + \frac{1}{R_Z} u_C&= 0, \\
C \frac{\mathrm{d} u_C}{\mathrm{d} t} &= i_L - \frac{1}{R_C} u_C - \frac{1}{R_Z} u_C, \\
\frac{\mathrm{d} u_C}{\mathrm{d} t} &= \frac{1}{C} i_L - \frac{1}{R_C \, C} u_C - \frac{1}{R_Z \, C} u_C, \\
\frac{\mathrm{d} u_C}{\mathrm{d} t} &= \frac{1}{C} i_L - \left(\frac{1}{R_C} + \frac{1}{R_Z}\right) \frac{1}{C}u_C, \\
\frac{\mathrm{d} u_C}{\mathrm{d} t} &= \frac{1}{C} i_L - \frac{1}{R \, C} u_C.
\end{split}
\end{align}
\end{split}\]
(4.9)#\[
\begin{align}
\frac{1}{R} = \left(\frac{1}{R_C} + \frac{1}{R_Z}\right).
\end{align}
\]
4.2.1. Stavový opis#
Získané diferenciálne rovnice prevedieme do maticového stavu
(4.10)#\[\begin{split}
\begin{align}
\begin{split}
\frac{\mathrm{d} i_L}{\mathrm{d} t} &= -\frac{r_L}{L}\, i_L-\frac{1}{L} u_C + \frac{1}{L} u_{s}, \\
\frac{\mathrm{d} u_C}{\mathrm{d} t} &= \frac{1}{C} i_L - \frac{1}{R \, C} u_C.
\end{split}
\end{align}
\end{split}\]
(4.11)#\[
\begin{align}
\pmb{\dot{x}} = \frac{\mathrm{d} \, \pmb{x}}{\mathrm{d} t}=\pmb{A} \, \pmb{x}+ \pmb{B} \, \pmb{u},
\end{align}
\]
(4.12)#\[\begin{split}
\begin{align}
\frac{\mathrm{d} }{\mathrm{d} t}
\begin{pmatrix}
i_L \\
u_C
\end{pmatrix} =
%
\begin{pmatrix}
-\frac{r_L}{L} & - \frac{1}{L} \\
\frac{1}{C} & -\frac{1}{R \, C}
\end{pmatrix}
%
\begin{pmatrix}
i_{L} \\ u_{C}
\end{pmatrix} +
%
\begin{pmatrix}
\frac{1}{L} \\ 0
\end{pmatrix}
%
u_{s}
.
\end{align}
\end{split}\]
(4.13)#\[\begin{split}
\begin{align}
\pmb{x} = \begin{pmatrix}
i_L \\
u_C
\end{pmatrix}, \,
\pmb{u} = u_{s}, \,
\pmb{A} = \begin{pmatrix}
-\frac{r_L}{L} & - \frac{1}{L} \\
\frac{1}{C} & -\frac{1}{R \, C}
\end{pmatrix}, \,
\pmb{B} = \begin{pmatrix}
\frac{1}{L} \\ 0
\end{pmatrix}.
\end{align}
\end{split}\]
4.2.2. Matlab/Octave#
Ukáž kód
% elektricky obvod
clc
clear all
close all
% parametre obvodu
rL=1e-3;
rC=5e6;
us=10;
L=10e-6;
C=10e-6;
Rz=100;
% krok simulacie
dt=1e-6;
% simulacny cas
Tsim=0.001;
R=(Rz*rC)/(rC+Rz);
% stavove matice
A=[-rL/L -1/L;
1/C -1/(C*R)];
B=[1/L 0;
0 0];
u=[us;0];
% matice nepriamej eulerovej metody
F=inv(eye(size(A))-dt*A);
G=F*dt*B;
% pociatocne podmienky
iL=0;
uC=0;
x=[iL;uC];
n=1;
% nepriama eulerova metoda
for t = 0:dt:Tsim
x=F*x+G*u;
iL(n)=x(1);
uC(n)=x(2);
time(n)=t;
n=n+1;
end
iC=(iL-(uC/R));
iR=uC/Rz;
% priebehy
figure
subplot(4,1,1)
plot(time,uC)
ylabel('uC [V]');
xlabel('t [s]');
grid on
subplot(4,1,2)
plot(time,iL)
ylabel('iL [A]');
xlabel('t [s]');
grid on
subplot(4,1,3)
plot(time,iC)
ylabel('iC [A]');
xlabel('t [s]');
grid on
subplot(4,1,4)
plot(time,iR)
ylabel('iR [A]');
xlabel('t [s]');
grid on
Online simulácia
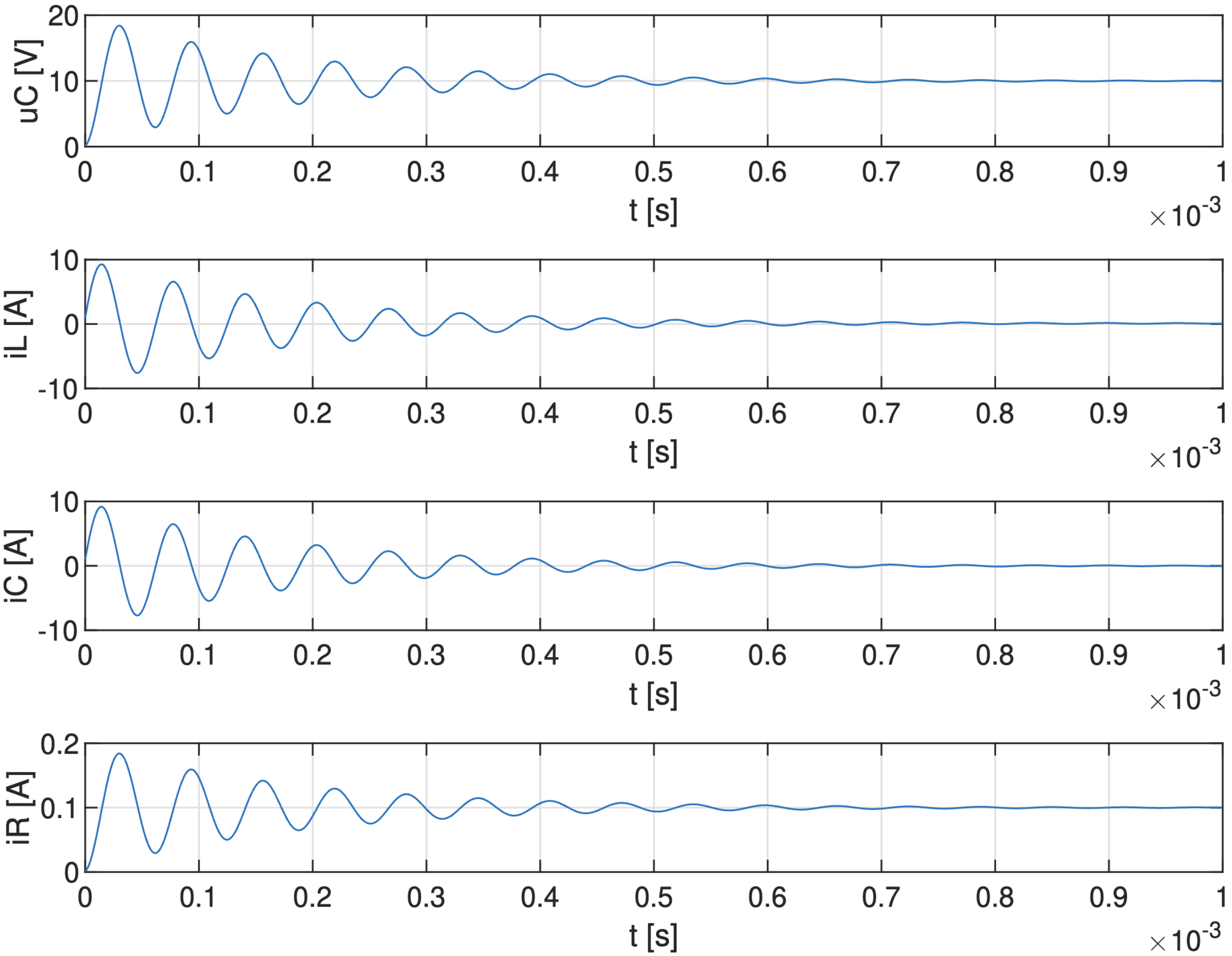
Obr. 4.3 Priebehy elektrických veličín.#